


FootfallCamなどのIoTデバイスTM 3D Mini、FootfallCamTM SpaceSenseなどはAnalyticManagerV9に直接接続していません。 これらのIoTデバイスは、送信機(FootfallCamなど)にバインドする必要がありますTM メッシュハブ)データをサーバーにプッシュするため。
1.1前提条件
IoTデバイスをバインドする前に、送信機を最初にサイトとペアリングする必要があります(参照してください) こちら デバイスをサイトにペアリングする方法について)。 これは、IoTデバイスによって収集されたデータを、ペアリングされたサイトの下のサーバーにアップロードできるようにするためです。
1.2送信機へのIoTデバイスのバインド
ステップ 1 -送信機のWi-FiSSIDを検索して接続します。
ステップ 2 -デバイスセットアップウィザードページにログインします。 ((FootfallCamサポート担当者からパスワードを取得してください)
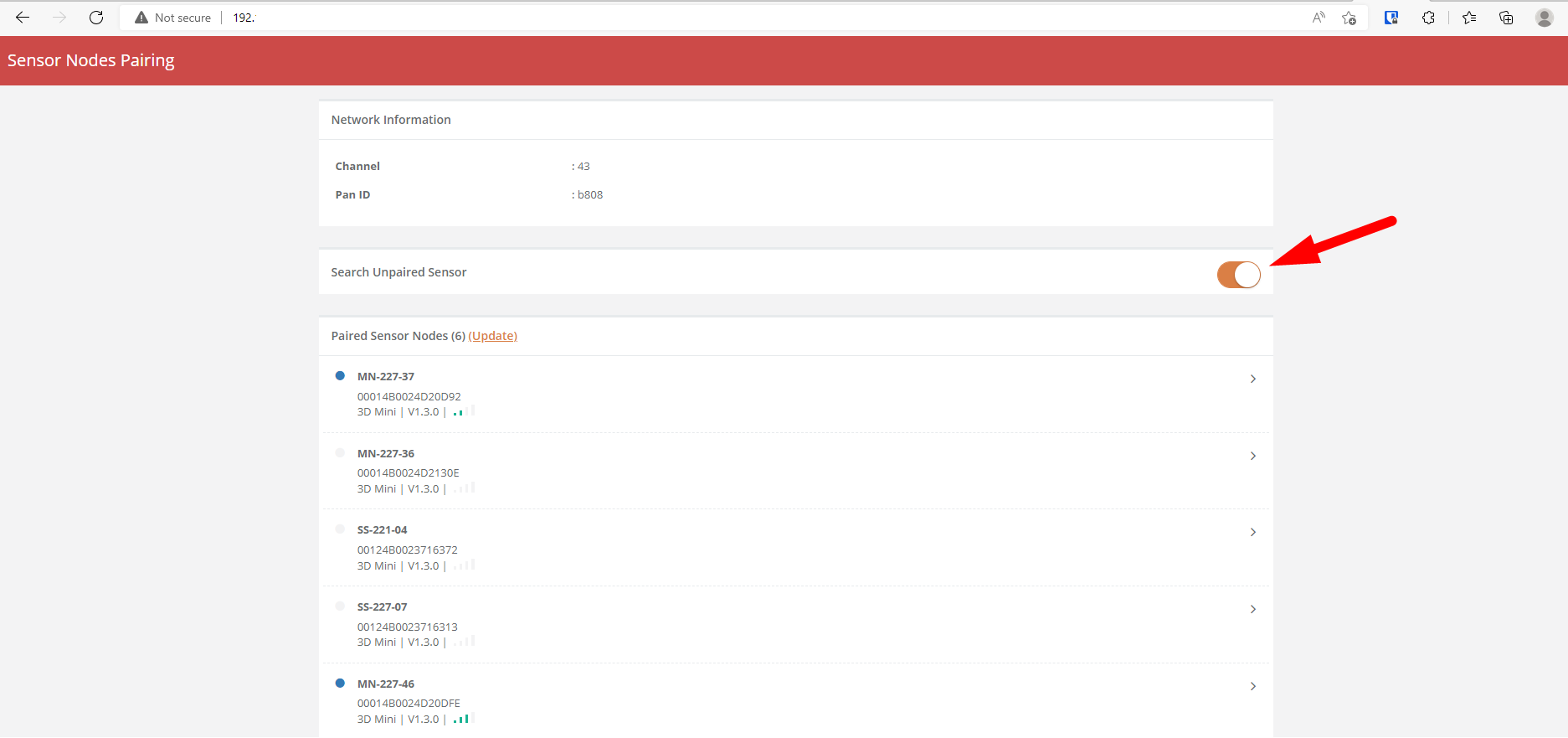
ステップ 3 -Webブラウザ(Safari、Google Chrome)にアクセスし、IPアドレスとペアリングしているセンサーノードを開きます。 ((FootfallCamサポート担当者からIPアドレスを取得してください)
ステップ 4 - オンにします ペアリングされていないセンサーを検索 ボタンをクリックして、近くのIoTデバイスを検索します。 (検索には1分かかる場合があります)
1.3 IoT デバイスのバインドを解除する
1.3.1FootfallCamTM スペースセンス
ステップ 1 - 空間感覚のネジを緩める
ステップ 2 - LED ライトが速く点滅するまでボタンを押し続けます。
ステップ 3 - Space Sense の電源を入れ直します
1.4基本的なセンサー情報の更新
ステップ 1 -IoTデバイスが正常にバインドされたら、IoTデバイス([ペアのセンサーノード]セクションの下)をタップして設定を構成します。
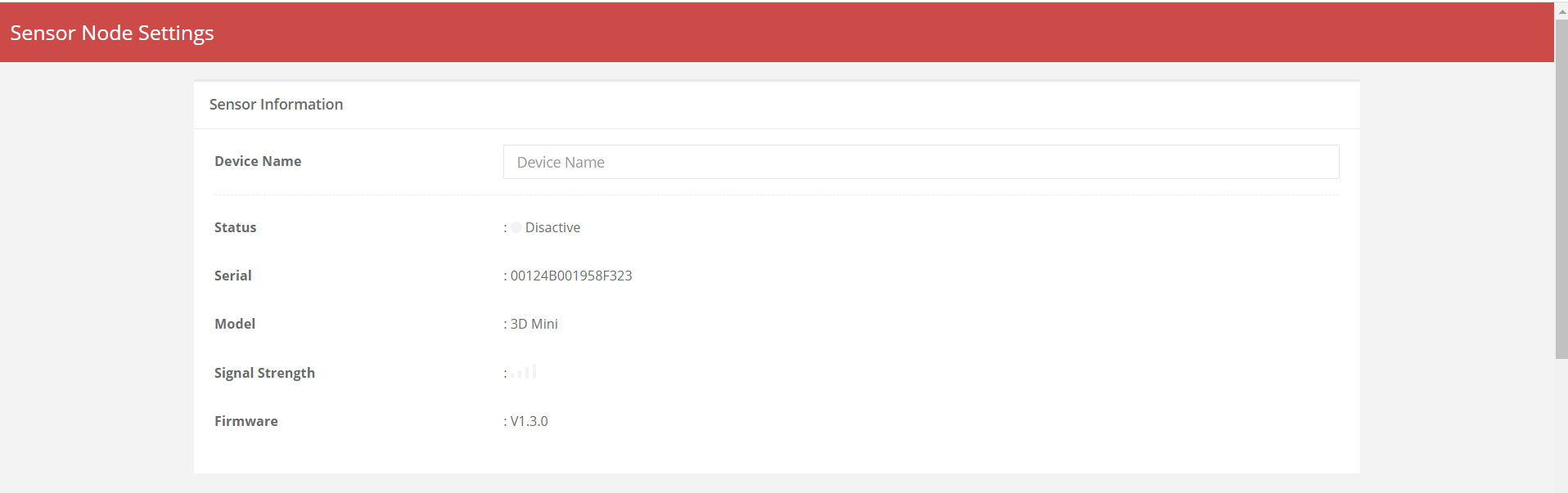
ステップ 2 -基本情報を表示および更新します。
|
アイテム価格 |
説明 |
|
1.デバイス名 |
デバイスの希望する名前を入力します。 |
|
2。 ステータス |
デバイスの接続状態を表示します。 |
|
3.シリアル |
デバイスのシリアル番号を表示します。 |
|
4 モデル |
デバイスのモデルを表示します。 |
|
5.信号強度 |
デバイスの信号強度を表示します。 |
|
6.ファームウェア |
デバイスのファームウェアバージョンを表示します。 |
1.5IoTデバイスのチューニング設定を構成する
1.5.1FootfallCamTM 3Dミニ
ステップ 1 -3D Miniが正常にバインドされたら、3D Mini([ペアのセンサーノード]セクションの下)をタップして設定を構成します。
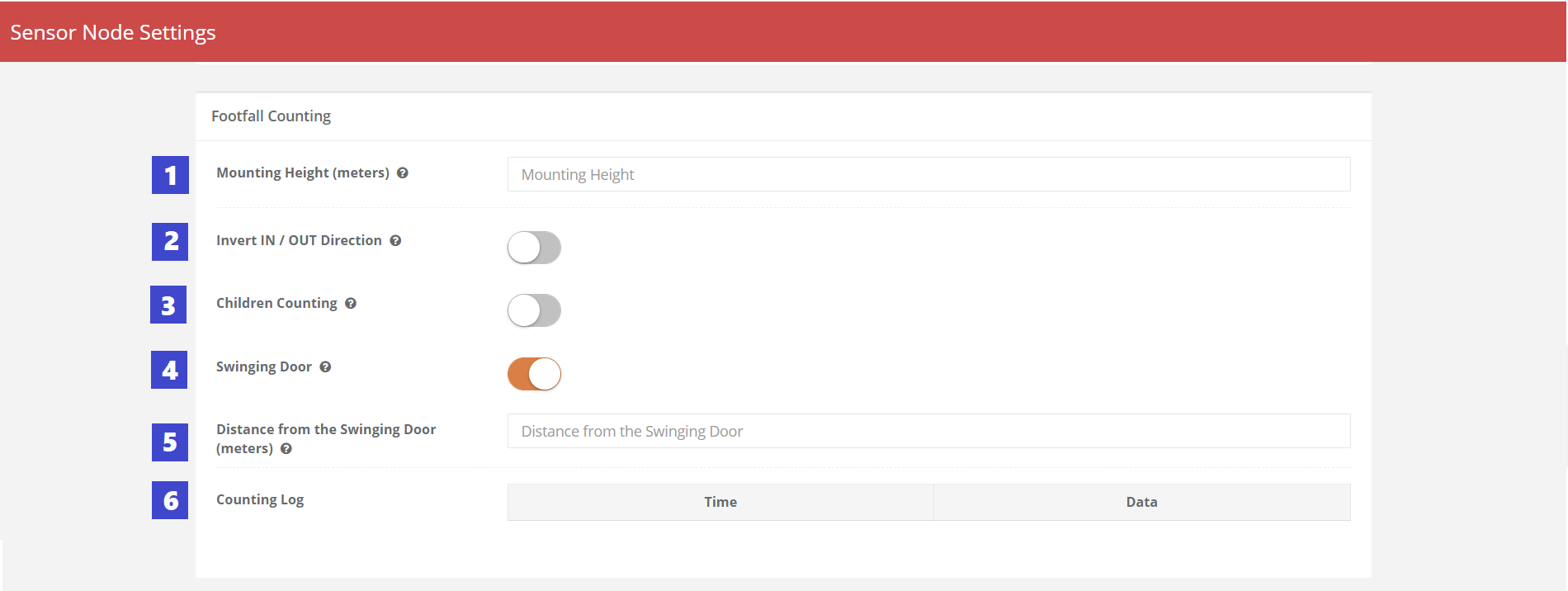
ステップ 2 -チューニングパラメータの設定を行い、保存します。
|
アイテム価格 |
説明 |
|
1.取り付け高さ(メートル) |
センサーと床の間の高さを入力します。 |
|
2. IN / OUT方向を反転します |
フットフォールカウントデータのIN / OUT方向を反転します。 |
|
3.子供を数える |
子供(身長120cm未満)をセンサーでカウントできるようにするため。 |
|
4.スイングドア |
スイングドアがあることを示し、フットフォールとしてカウントされるドアを排除します。 |
|
5.スイングドアからの距離(メートル) |
センサーとスイングドアの上部の間の高さを入力します。 |
|
6.カウントログ |
最新時刻のIN / OUTカウントの記録を表示します。 |
ステップ 3 - 歩行テストを実行します (デバイスが取り付けられている入り口を数回出入りします)、INおよびOUTデータがカウントログに記録されているかどうかを確認します[上の画像のポイント6]。 ログに記録されたデータが実際のINおよびOUT方向と一致しない場合は、 IN/OUT方向の反転を切り替えます ボタン[上の画像のポイント2]。
ステップ 4 -基本的なフットフォールカウント設定が正確なカウントを提供するのに十分でない場合は、事前調整が必要です。 FootfallCamチームに連絡して支援してください アドバンスチューニング.
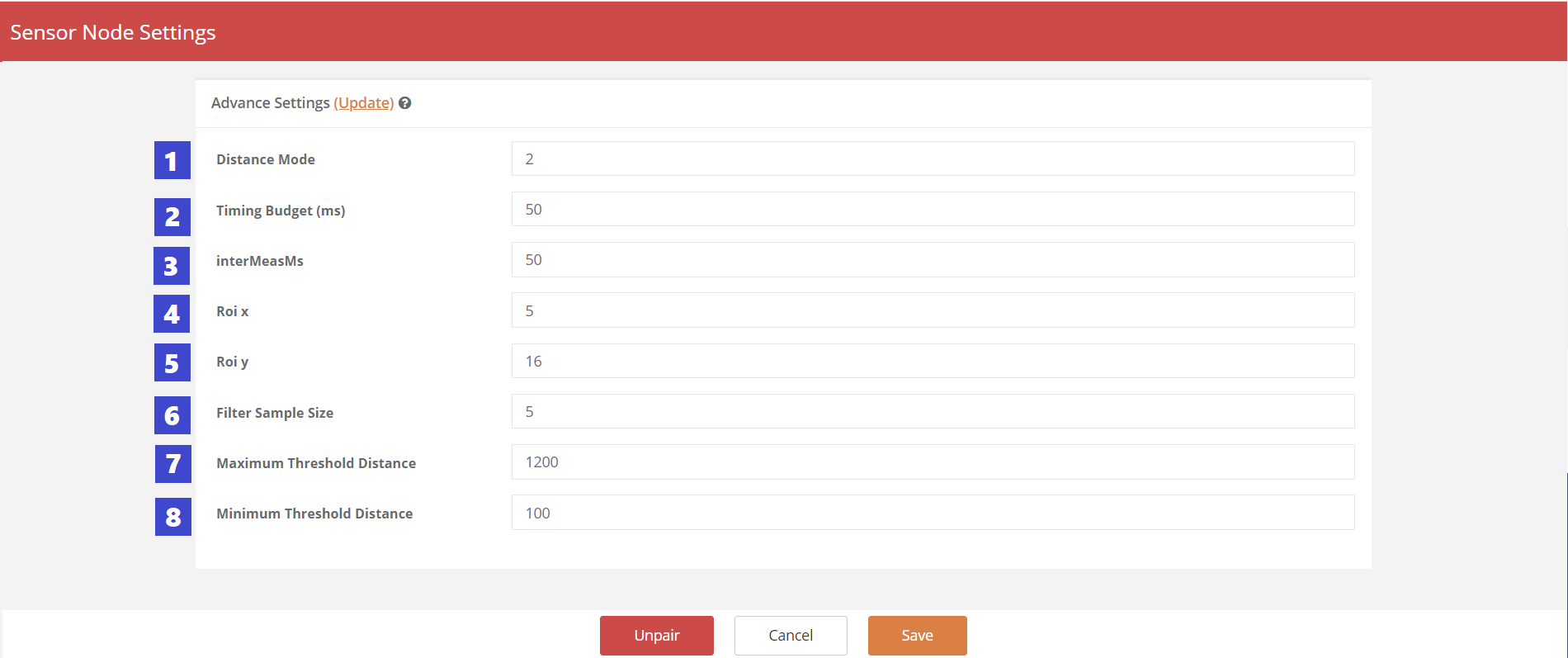
あなたがする必要があります 不正確なカウントの状況を簡単に説明する 3Dミニの、そして 更新された詳細設定の印刷画面を送信します FootfallCamチームにアドバイスを求めます。
|
アイテム価格 |
説明 |
| 1.距離モード | 短距離または長距離。 |
| 2.タイミングバジェット(ミリ秒) | タイミングの値を取得します。 |
| 3.中間測定 | タイミングで取得した値を処理します。 |
| 4.ロイx / ロイy | X軸とY軸での検出の領域サイズ |
| 5.フィルターサンプルサイズ | 正確なデータを確実に取得するために取得したデータ値をフィルタリングします。 |
| 6.最大しきい値距離 | カウントされる距離の最大値。 |
| 7.最小しきい値距離 | カウントを開始する距離の最小値。 |
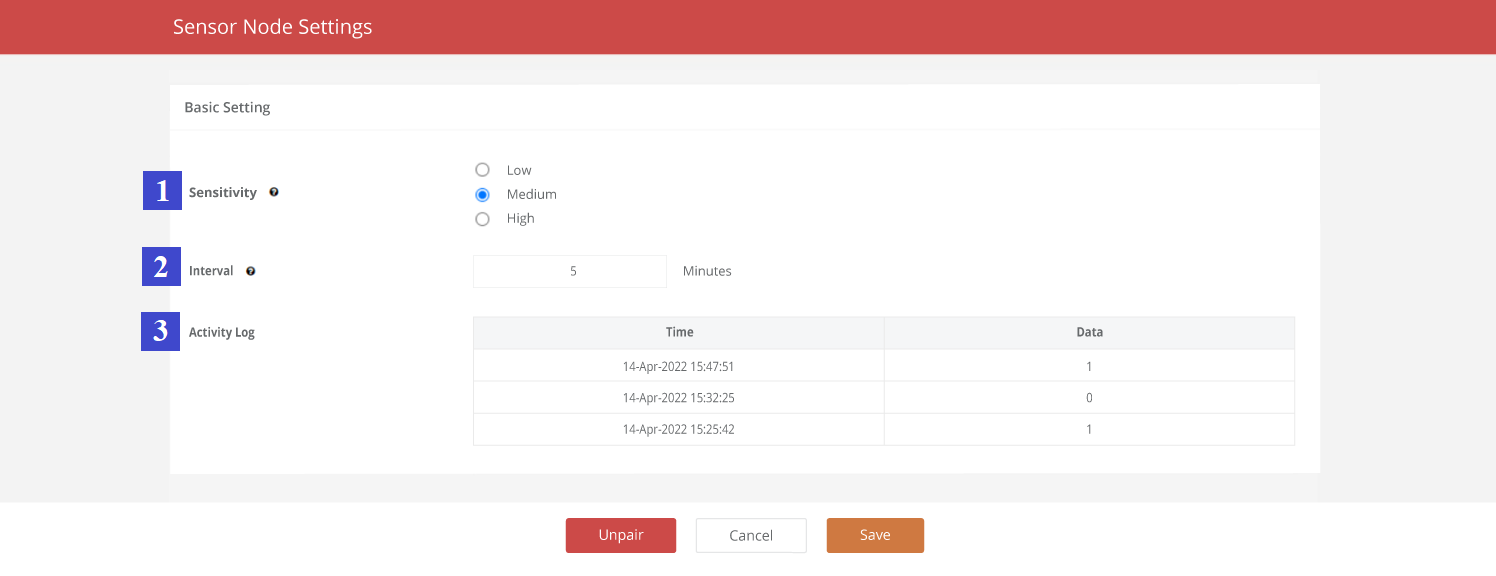
1.5.2FootfallCamTM スペースセンス
ステップ 1 -Space Senseが正常にバインドされたら、Space Sense([ペアのセンサーノード]セクションの下)をタップして設定を構成します。
ステップ 2 -チューニングパラメータの設定を行い、保存します。
|
アイテム価格 |
説明 |
| 1.感度 | 状態変化に対する動きに対する感度。 低感度ではスペースが占有されていることを検出するために大きな動きが必要でしたが、高感度では小さな動きで状態変化がトリガーされます。 |
| 2.間隔 | それらの。 状態変化をトリガーするために同じ状態にとどまるのに必要な連続時間。 例えば。 間隔が3分に設定されている場合、状態を「占有」に、またはその逆にトリガーするには、スペースを3分間連続して占有する必要があります。 最小間隔は1分です。 提案:最適な間隔は2分から5分の間です。 |
| 3.アクティビティログ | 設定された感度と間隔に従って、スペースセンスによって検出された状態変化を表示します。 |
1.6LEDライトインジケーター
 |
 |
| FootfallcamTM 3Dミニ | FootfallCamTM スペースセンス |
|
LEDの色
|
表示 |
|
|
有線デバイス |
バッテリーデバイス |
|
|
1.コンスタントライト |
(準備) 正常にバインドされ、問題はありません デバイスはマスターデバイスにバインドされています。 |
無し 注:バッテリーの消費を最小限に抑えるために、バッテリー駆動のデバイスにはコンスタントライトは適用されません |
|
2.点滅するライト |
(準備ができていない) 送信機へのバインドを保留中 >状態:デバイスはまだどの送信機にもバインドされておらず、バインドを待機しています。 >アクション:このIoTデバイスを送信機にバインドすることに進みます。 |
(準備ができていない) 送信機へのバインドを保留中 >状態:デバイスはまだどの送信機にもバインドされておらず、バインドを待機しています。 >アクション:このIoTデバイスを送信機にバインドすることに進みます。 |
|
3.光がない
|
(準備ができていない) 電源を入れない >状態:デバイスの電源が入っていません。 >アクション:IoTデバイスの電源を確認してください。
|
(準備ができていない) 電源を入れない >状態:接続ステータスが 切断された & 光がない |
|
(準備) 正常にバインドされ、問題はありません >接続ステータスが コネクテッド – & 光がない |
||